

机器人自动寻路
1. 划定寻路的范围
Volumes 中找到 Nav Mesh Bounds Volume, 将这个组件拖入场景中
调整该组件的范围和大小,直到覆盖需要的范围。
选中该组件,按下P。
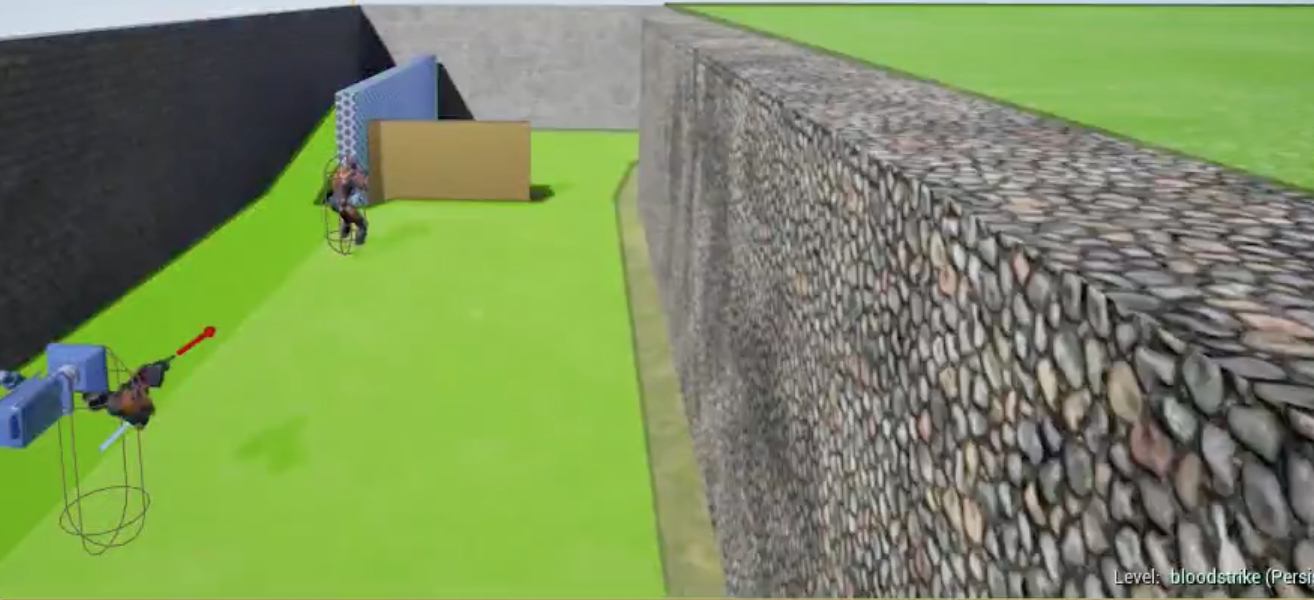
绿色的范围就可以寻路的范围。
2. 基于AI Controller 创造一个Controller,用来控制机器人运动
AI Move To 只能在AI Controller 使用,作用控制移动。
3. 将 AI Controller 和 机器人绑定
机器人蓝图中的AI Controller 设置为新创建的Controller
问题:机器人移动的时候没有动画,直接飘过来了。